驱动板用于操作和控制无刷马达。
※不单独出售。驱动器可与电机组合购买。
数字伺服驱动板 SSD06-R5A
用于无刷电机的驱动控制。
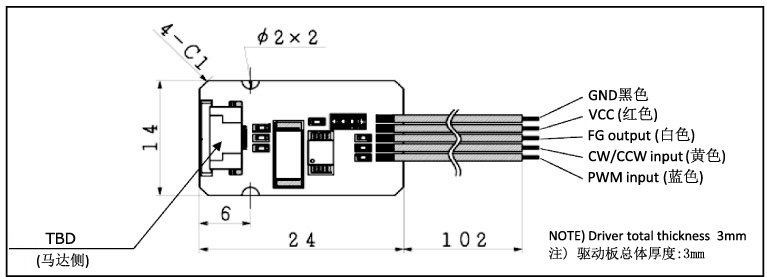
SSD06-R5A是一款3相无传感器驱动板,专门设计用于控制无刷马达BMN04-08XX和BMS07-13XX(可选无传感器)。FG(频率发生器)在马达每旋转一圈时输出一个脉冲。旋转·方向的输入(CW/CCW输入)取决于选定的马达而不同。
技术参数
| |
|
SSD06-R5A |
| Min. |
Typ. |
Max. |
| 1 |
电压 |
1.8 |
3.0 |
5.5 |
| 2 |
电流消耗 |
|
5 |
10 |
| 3 |
输出电流 |
|
|
0.5 |
| 4 |
旋转方向输入电压: 正转(Low) |
0.0 |
|
0.5 |
| 5 |
旋转方向输入电压: 反转(High or Open) |
VCC-0.5 |
|
VCC |
| 6 |
PWM占空比: 载波频率 |
20 |
|
50 |
| 7 |
PWM占空比脉冲输入: 低电平电压 |
0.0 |
|
0.5 |
| 8 |
PWM占空比脉冲输入: 高电平电压 |
VCC/2 |
|
VCC |
| 9 |
FG脉冲输出: 低电平电压 |
0.0 |
|
0.4 |
| 10 |
FG脉冲输出: 高电平电压 |
|
|
VCC |
| 11 |
运行温度范围 |
-20...+75 |
| 12 |
重量[g] |
1.1 |
数字伺服驱动板 SHSD24-01A
用于无刷电机的驱动控制。

SHSD24-01A驱动板适用于所有Orbray无刷马达(可带有或不带霍尔传感器)。并且在所要求的和实际的旋转速度有差异的情况下,自动调整供应电源。同时具有电流限制保护功能,可通过LED/LCD和模拟电压输出来检测其状态。
运行模式
| EXT/IO |
旋转速度和方向可通过外部输入/输出信号控制。 |
| VR |
旋转速度和方向可通过内嵌式电位计或开关控制。 |
| PC |
旋转速度和方向可通过PC上的RS232C控制(需安装软件)。 |
接口规格
| 名称 |
功能 |
| CN2 |
电源/I/O接口 |
| CN3 |
RC232C通信用接口 |
| CN4 |
LDC用接口 |
| 名称 |
匹配马达 |
| CN5(8pin) |
带霍尔传感器马达(BMS07-BMS16) |
| CN6(4pin) |
无传感器(导线) |
| CN7(4pin) |
无传感器FPC(BMN04, BMN07) |
切换规格
| 名称 |
功能 |
| SW1 |
选择马达 |
| SW2 |
选择运行模式,控制 |
| SW3 |
PI GAIN ,旋转方向切换 |
| SW4 |
3V输出/电源电压输出 |
[CN2]标识:
电源和各I/O连接器
| Pin# |
名称 |
I/O |
功能 |
| 1 |
FG |
O |
旋转速度监视器 |
| 2 |
STATUS |
O |
状态显示 |
| 3 |
ENABLE |
I |
启动输入 |
| 4 |
CW/CCW |
I |
旋转方向切换 |
| 5 |
SPEED |
I |
旋转速度设定 |
| 6 |
+Vcc |
- |
输入电压 7.5V~26.4V |
| 7 |
GND |
- |
电源 GND |
电气参数
| 项目 |
规格 |
| 电源电压[V] |
7.5~26.4v |
| 电流消耗[mA] |
30 |
| 输出电压[V] |
3.0~26.4 |
| 最大输出电流[A] |
2 |
| 最大持续电流[A] |
1 |
| 最大旋转速度[rpm] |
150,000
|
输入/输出信号规格
(EXT/IO模式)
| 名称 |
接口 |
明细 |
规格 |
| FG |
CN2-1 |
0-5信号输出Duty83%转速 |
| 转速[rpm]=FG频率[Hz]×60 |
| STATUS |
CN2-2 |
运行错误 |
5V |
| 运行错误 |
Duty50% 脉冲宽幅1.0s |
| 运行待机状态 |
0V |
| 运行状态 |
Duty50% 脉冲宽幅0.2s |
| ENABLE |
CN2-3 |
允许运行 |
< 1.00V or GND |
| 不可运行 |
> 4.00V or OPEN(开放) |
| CW/CCW |
CN2-4 |
旋转方向 CCW |
< 1.00V or GND |
| 旋转方向CW |
> 4.00V or OPEN(开放) |
| SPEED |
CN2-5 |
转速0rpm |
模拟电压0V |
| 最大转速(每一机种) |
模拟电压5V |